第03部分 红黑树
一、范围查找问题
- 给定直线L上的点集P=p0,...,pn−1,对于任一区间R=[x1,x2],P中的哪些点落在其中?
- 这种问题的解决方案两种
- 蛮力算法:只需遍历点集P,并逐个地花费O(1)时间 判断各点是否落在区间R内,缺点是数据集爆炸的时候,效率直接降低
- 正确方法:先进行预处理,比如我进行快速排序,消耗的时间是O(nlogn)
- 之后我再查找的时候,定位最小的元素,只需要O(logn)的时间,然后遍历找出r个点,则总体的查询时间成本为O(r+logn)。
二、二维范围查找问题
方法一:
- 如果点在二维的查询空间呢!我们再考虑容斥原理
- 根据容斥原理 ∣R∩P∣=n(X1,Y1)+n(X2,Y2)−n(X1,Y2)−n(X2,Y1)
- n(X1,Y1) 的含义是在平面的(x1,y1) 左下方的点的数量
- 利用这种方法,需要空间复杂度是O(n2),但是查询很快,只需要O(logn)
- 但是这种方法需要预处理,耗费的时间 O(n2)
- 预处理的时候需要记下来n(x,y)=∣(0,x]×(0,y]∩P∣
方法二:
- 如果点在二维的查询空间呢!我们再考虑构造平衡二叉树
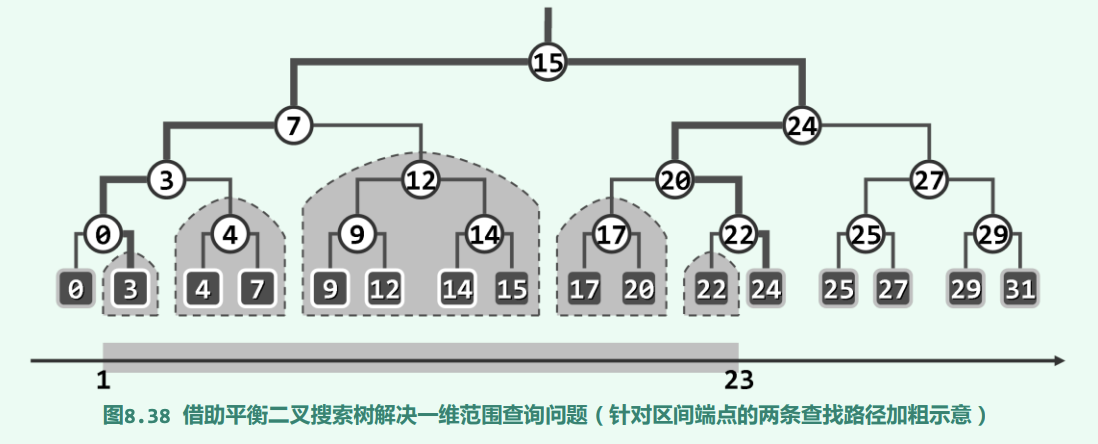
- 设查询区间为[1, 23]。首先,在树中分别查找这一区间的左、右端点1和23,并分别终止于叶节点3和24。 接下来,考查这两个叶节点共同祖先中的最低者,即所谓的最低共同祖先,也就是15
- 然后从祖先出发,分别重走一遍通往节点3和24的路径(分别记作path(3) 和path(24))。在沿着path(3)/path(24)下行的过程中,忽略所有的右转/左转;而对于每一次左转/右转,都需要遍历对应的右子树/左子树(图中以阴影示意)
- 最终查找得到结果,消耗的时间复杂度是O(logn),用这种思路可以很快的拓展到更高纬度的数据
三、KD-Tree
1)概念
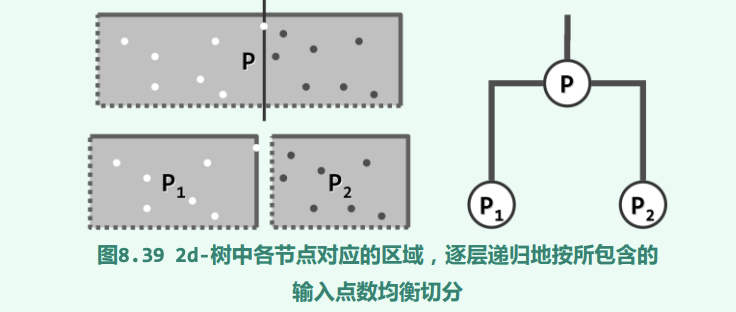
- 2d-树中的每个节点,都对应于二维平面上的某一矩形区域,且其边界都与坐标轴 平行。当然,有些矩形的面积可能无限
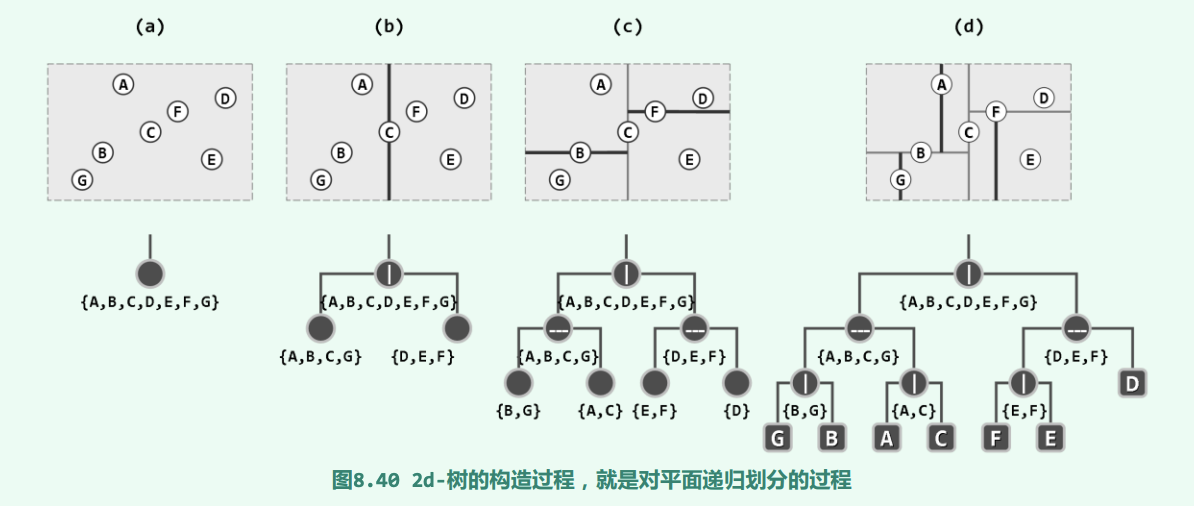
2)构造实例
- 首先创建树根节点,并指派以整个平面以及全部7个输入点
3)查询实例
- 初始化递归查询的区域为v,也就是树的根节点
- 此时,视矩形区域v与查询区域R的相对位置,无非三种情况:
- 若矩形区域v完全包含于R内,则其中所有的输入点亦均落在R内,于是只需遍历一 趟子树v,即可报告这部分输入点。
- 若二者相交,分别深入到v的左、右子树中,递归地查询
- 若二者彼此分离,不需要查了结束
4)复杂度
- 平面范围查询与一维情况不同,在同一深度上可能递归两次以上,并报告出多于两棵子树。 但更精细的分析(习题[8-16])表明,被报告的子树总共不超过O(n)棵,累计耗时O(n)
- 空间复杂度O(n),预处理的时间复杂度O(nlogn),查询的时间复杂度是O(n+r),排除掉r的部分,其余的查找时间决定与递归发生的次数,还有待查找区域边界和子区域的相交的数目Q(n)
- 递推关系Q(1)=O(1),Q(n)=2+2Q(n/4)
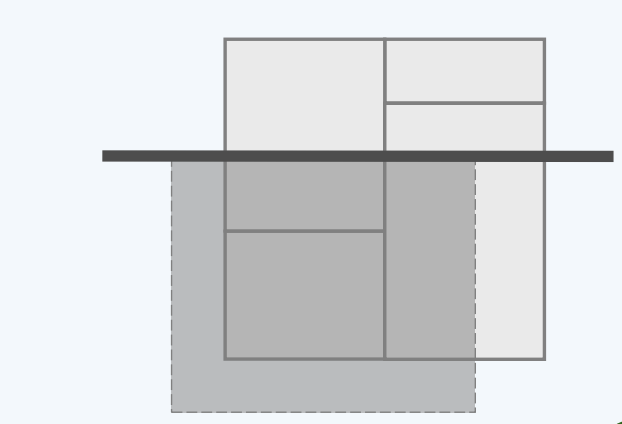
- 如下图所示,深色的区域代表查找区域,浅色的就是数据范围区域
- 每次递归到节点t的时候,儿子节点两个(大约n/2个数据点在里面),孙子节点四个(大约n/4个数据点在里面)
- 我们可以发现,最多还需要递归两个孙子节点,那就是下图的左上方的区域、右下方的区域。至于左下方的区域不需要递归了!因为左下方区域的所有点都在查找范围里面!右上角没有数据在目标里面,也不需要递归!
四、高维度推广
- kd树本质是高维度K的情况,我们二维的时候考虑的是2d树
- 假设有d维的情况下,空间复杂度是O(n),预处理O(nlogn),查询 O(n1−1/d+r)
- 仿照上面证明,假如是三维的时候,儿子节点两个(大约n/2个数据点在里面),孙子节点四个(大约n/4个数据点在里面)第三代节点8个(大约n/8个数据点在里面)
- Q(n)=4+4Q(n/8)